Sobel operator
The Sobel operator is a simple way to approximate the gradient of the intensity in an image. This, in visual terms, can be used for edge detection. The purpose of edge detection is to significantly reduce the amount of data in the image, while preserving the structural properties to be used for further image processing.
In practice, the Sobel operator is simply a pair of 3×3 (separable) convolution kernels. One highlights the horizontal gradient/edges, and the other one highlights the vertical gradient/edges.
\[S_x=\begin{bmatrix}-1&+0&+1\\-2&+0&+2\\-1&+0&+1\end{bmatrix}\] \[S_y=\begin{bmatrix}+1&+2&+1\\+0&+0&+0\\-1&-2&-1\end{bmatrix}\]In non-formal terms, and under certain theoretical assumptions, this is conceptually equivalent to computing the partial derivatives of the image with respect to x and y.
For the examples below, I am using as input the same image featured by Wikipedia in the Sobel operator page:
Sobel operator
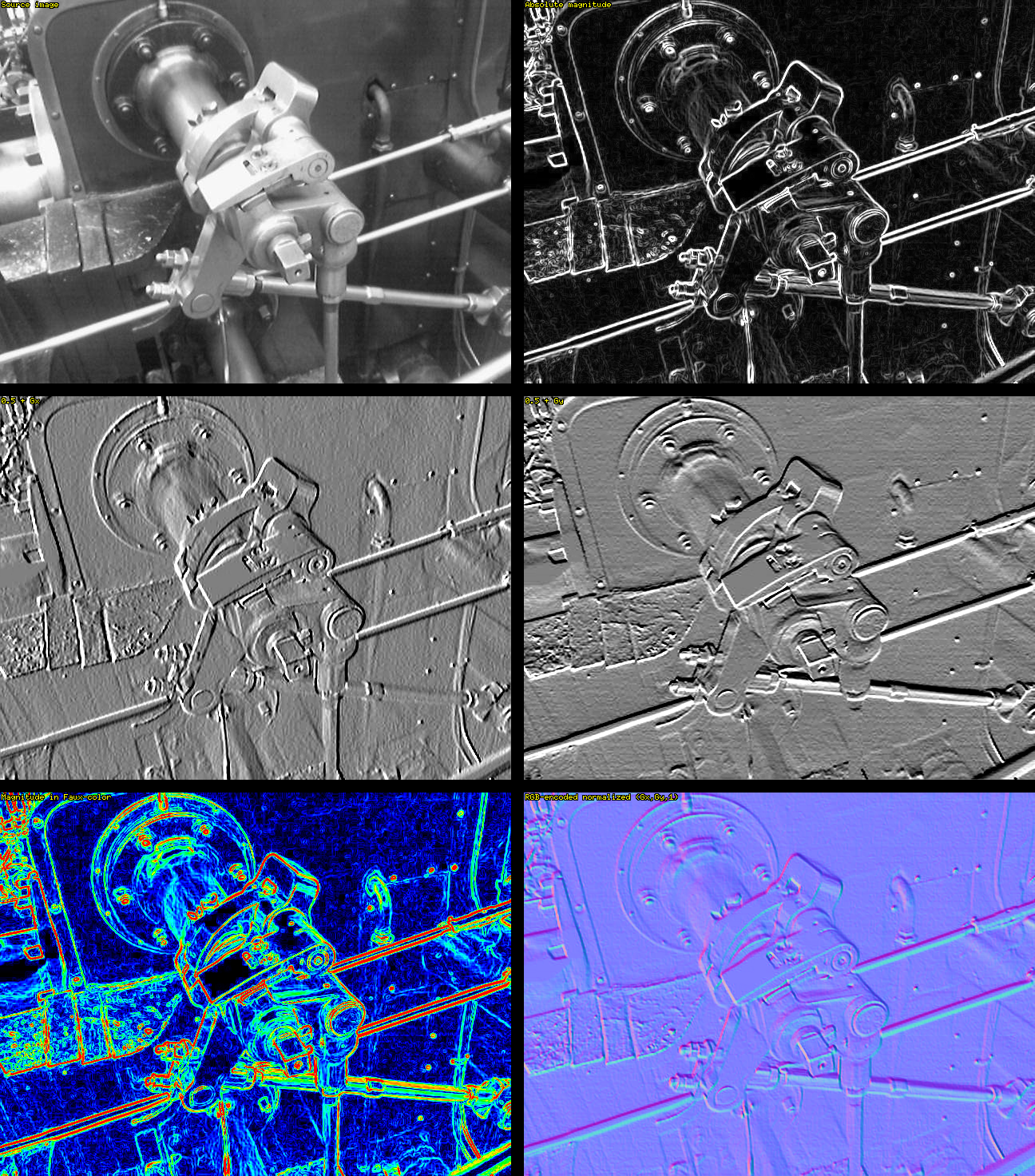
This grid presents:
- The input image (luminance).
- The absolute magnitude of the result of the Sobel filter.
- The result of the Sobel
xfilter. - The result of the Sobel
yfilter. - Same as (2), but in faux color.
- The gradient vectors, normalized and displayed as an RGB-encoded normal map.
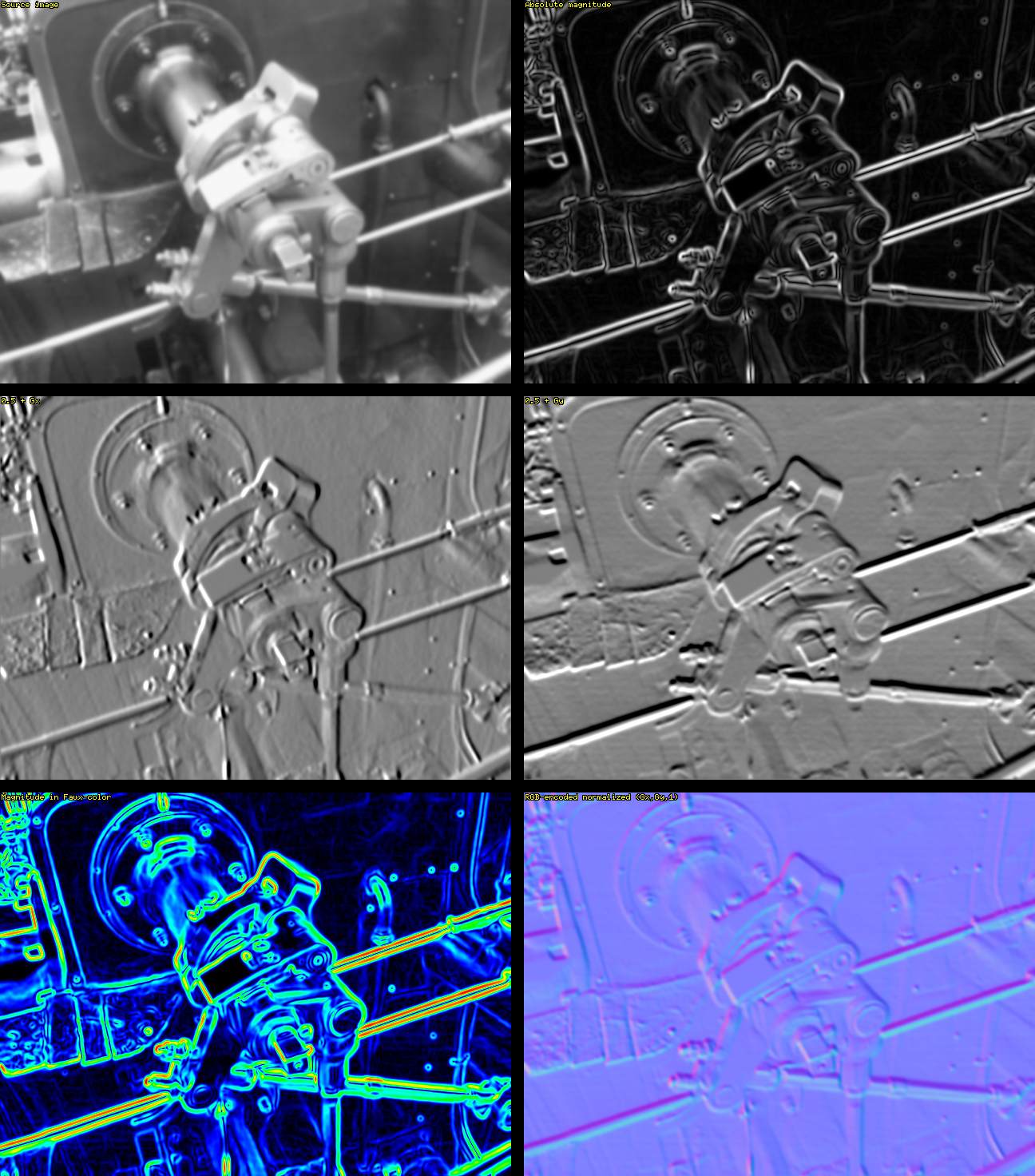
The 3-tap Sobel convolution kernels have a 1px radius, so they have a very limited edge detection range. This makes the filter quite shaky as soon as the image presents fine details or noise. For this reason, one may want to pre-pass the input image with a subtle Gaussian blur.
This has the effect of diminishing edges in general (as expected), but the resulting gradient images are equivalent, yet much cleaner.
Sobel operator (Gaussian with sigma=2)
The Sobel operator is one of the most fundamental building blocks in feature detection in the field of Computer Vision.
Note that the Sobel operator does not characterize edges or detects features in any way. It simply produces a filtered image where pixels that most likely belong to an area of high gradient (such as an edge) are highlighted.
Bonus remark: Sobel filtering is used by render engines such as Maverick to transform height maps (bump maps) into normal maps.